Первый раз с столкнулся с необходимостью нанести круглую якорную стоянку еще 10 лет назад, будучи вторым помощником. ECDIS хоть и был, но карт не было. Как бы это тогда еще не требовалось. Помню якорная стоянка была у порта на севере Японии, который назывался Томакомай. Карта была мелкомасштабная и снимать координаты с маленькой окружности было не весело.
Еще тогда я задумался о том, как бы рассчитать координаты на окружности, зная центр окружности и его радиус. К сожалению, интернета на судне не было, а все архивы литературы на компьютере не помогали ответить на этот вопрос.
Если прибегнуть к логике, то можно сдвинуть центр EBL/VRM радара в координаты центра якорной стоянки и нанести контур таким способом. Но судно носило на якоре из-за ветра и EBL/VRM постоянно дрейфовал с заданной позиции.
Сейчас, казалось бы, есть и ECDIS, и карты на нем есть в обязательном порядке, а контуры всё равно наносят и на радар. Помимо того, если говорить, например, об оффшоре, то бывает, что есть местные карты, которых нет на ECDIS. Или есть рабочие районы, сектора и т.д., которые запрещено пересекать. Поэтому, надеюсь, что представленный в уроке расчет всё равно найдет применение.
Соблюдение правил МППСС и избежание столкновения с одним судном справа является вполне тривиальной задачей. Но ситуация значительно меняется при появлении большего количества участников. Несение ходовой вахты – очень ситуационная задача: одни и те же места могут быть тихими и спокойными в один день и совершенно безумными в другой. Когда дело касается плотного трафика и принятия решений, действительно ли мы понимаем, что делаем на мостике и как правильно использовать радар или же мы просто следуем какому-то «внутреннему голосу», для того чтобы выдержать заданный СРА? Если мы делаем последнее, то однажды мы можем оказаться в неблагоприятной ситуации, из которой не сможем найти выход. Ибо на сегодняшний день судовождение – это, прежде всего, точная наука, а уже потом искусство. Для того чтобы действительно понимать, что мы делаем, мы должны знать законы относительного движения и уметь быстро применять на практике графические методы оценки опасности столкновения судов.
Из многочисленных книг и доступных в интернете источников мы с легкостью можем найти как построить треугольник относительного движения и избежать столкновения с одним судном. Несколько сложнее дело обстоит с практическим пояснением расхождения с несколькими целями. Что наиболее важно отметить, что, когда целей на радаре больше одной, количество различных ситуаций возрастает по закону геометрической прогрессии.
Мы можем считать радиолокационную прокладку устаревшим и ненужным навыком, и что ARPA поможет нам разрешить любую ситуации, однако статистика говорит, что большинство столкновений происходит по причине неправильной или несвоевременной оценки ситуации. В конце концов, ARPA и AIS позволяют только лишь определить CPA / TCPA на текущий момент, если параметры судов не изменяются. Для того, чтобы принять правильное решение при расхождении с несколькими судами, необходимо четко понимать, как наш собственный маневр изменит их относительное движение.
Следует отметить, что проведенная Learnmarine в последнее время практическая оценка компетентности штурманов показала, что существуют определенные общие стереотипы, ведущие к совершению ошибок при выполнении задач на симуляторах.
Давайте рассмотрим некоторые наиболее часто повторяющиеся ситуации и соответствующие ошибки.
Недооценка риска
Это происходит, когда мы не принимаем во внимание следующие факторы:
· Согласно IMO Performance Standards for RADAR Equipment, погрешность СРА на ARPA может достигать 0.3 nm.
· Если проверять CPA по AIS, эта дистанция может быть нестабильной и принимать различные значения, зависящие от колебаний судна-цели и точности его датчиков.
· Также мы не должны забывать принимать во внимание размеры судна-цели.
· Даже если дистанция между судами велика, следует всегда проверять TCPA, чтобы понимать насколько быстро развивается ситуация.
Маневр выполнен слишком поздно либо недостаточно велик
Если не принять к учету инерционность собственного судна, маневр может быть окончен не настолько рано как ожидалось. Особенно, если в начале мы снижаем скорость, а потом маневрируем курсом. Уменьшение скорости соответственно снижает нашу поворотливость. Для того чтобы достичь той же угловой скорости на пониженных ходах, руль нужно перекладывать на большие углы. Об этом часто забывают.
Согласно циркуляру IMO MSC. 137 (76) 2002 выдвиг судна на циркуляции не должен превышать 4.5 LOA (Length Overall). Практически это означает, что если другое судно пересекает наш курс под прямым углом (90°) с CPA = 0, и дистанция до точки контакта менее 4.5 LOА – столкновение неизбежно. Для судна длиной 300 м эта дистанция составляет 1350 м или 0.73 мили.
Полагаться на авторулевой, когда необходим быстрый маневр
Авторулевой изначально настроенный для океанского перехода, может не реагировать настолько быстро. Плохая практика – выставить новый курс на авторулевом и оставить его без наблюдения. Пока мы думаем, что судно уже начинает поворачивать, может не произойти вообще никаких изменений.
Следует учитывать угол поворота и реалистичную угловую скорость. Если установленная в АР угловая скорость составляет 20°/min, то поворот на 40° может занять порядка 3-х минут. Таким образом, чтобы достичь желаемой CPA следует начинать поворот как минимум за 3 минуты.
С другой стороны, ручное управление позволяет достичь более скорого эффекта, однако негативно влияет на контроль над ситуацией. Как только штурман сам перешел на ручное управление, его внимание полностью концентрируется на штурвале и репитере компаса. Следовательно, о необходимости привлечения рулевого стоит подумать заранее, если ситуация развивается соответствующим образом и в данный момент его нет на мостике.
Выполнение маневра для менее опасной цели
Если мы расходимся с несколькими судами, мы должны определить, какие цели нас ограничивают, а какие являются наиболее опасными. В случае, показанном на рисунке ниже, достаточно часто штурмана просчитывают маневр для пересекающего судна В. Проблема заключается в том, что если судно А не сманеврирует (допустим у него есть обгоняющее судно справа, либо недостаточно глубины для маневра) мы окажемся опасно близко к нему. Это вызвано тем что ТСРА с ним больше и, соответственно, для расхождения на безопасной дистанции необходимо большее изменение курса.
Игнорирование маневра скоростью
По какой-то причине многие штурмана полностью игнорируют возможность маневра скоростью. Конечно, COLREGs Rule 8 рекомендует изменение курса, если "there is sufficient sea-room available". Но в том же правиле написано:
"…If necessary to avoid collision or allow more time to assess the situation, a vessel may slacken her speed or take all way off by stopping or reversing her means of propulsion.”
Следует учитывать, что снижение хода занимает, как правило, 5-10 минут. Однако, маневр может быть выполнен быстрее, если сбавить ход с Full Ahead до Dead Slow Ahead или STOP, чтобы достигнуть скорости соответствующей режиму Slow Ahead.
Так как на меньших ходах судно поворачивает медленней, ввиду меньшего упора от винта на пере руля, можно использовать толчки "kick ahead" для того, чтобы достигнуть необходимой скорости поворота.
Ролик с ютуба:
Не учитывается как маневр с одним судном повлияет на ситуацию с другим
На рисунке ниже судно В слева изначально проходит чисто по носу и не обязано предпринимать действия по избежанию столкновения. Однако, наш собственный маневр вправо для судна Аможет «подтянуть» его к нам на опасно близкую дистанцию и привести к ситуации, когда судно В не может избежать столкновения собственным маневром. Это происходит от того, что при нашем повороте вправо линия относительного движения (ЛОД) судна впереди траверза разворачивается по часовой стрелке. Именно поэтому никогда не стоит пренебрегать оценкой лимитирующих целей.
Выполнение 2-го маневра слишком рано, когда 1-я цель не пройдена
В ситуации, отображенной на рисунке ниже, штурман может предпочесть снизить скорость, чтобы уступить дорогу судну В (которое около 10° позади траверза).
Однако это не улучшает значительно ситуацию с судном А, ограниченным в возможности маневрировать, а лишь немного увеличивает ТСРА. Важным, в данной ситуации, является нахождение момента, когда мы можем начать поворачивать вправо, не уменьшая СРА с судном В. Загвоздка заключается в том, что ЛОД позади траверза справа при уменьшении скорости поворачивает против часовой стрелки, однако, когда цель В окажется впереди траверза, поведение ЛОДа изменится и при нашем повороте вправо он будет поворачивать по часовой стрелке.
Итоги и выводы
Как было приведено выше просто видеть вектора на радаре либо знать СРА не всегда достаточно для того, чтобы принимать верные решения. Чтобы найти оптимальный выход в ситуации расхождения с несколькими судами, штурман должен понимать:
(a) Как применять МППСС в различных ситуациях; и
(b) Законы относительно движения.
Именно поэтому мы и разработали анимированный онлайн курс Radar Plotting , который охватывает не только работу с планшетом, но и закономерности изменения ЛОДов, особенности использования ARPA, учет инерционности судна и готовые решения ряда ситуаций расхождения с несколькими судами, подробно разобранные на планшете.
Оригинальная статья на английском языке доступна на проекте Learnmarine по ссылке.
Приехал штурман страшный (или старший) на любимый свой теплоход и обнаружил, что нет больше сигналов от АРПА (Furuno 2117) на ECDIS (Transas Navi-Sailor 4000). А на радаре модном (Consilium Sea Hawk) нет более от гирокомпаса сигнала, и цели он не обсчитывает, только планшет нужно применять….
Раззадорился штурман.
- Хорошо, - думает – сейчас в порт пойдем, три дня стоять будем, сервис закажем, сервис все починит!
- А, дудки тебе, - сказал капитан – сервис уже был (Furuno) и ничего они не починили. Сказали, что с Furuno сигнал идет как надо – это ваш Transas все виновен!
Понурился штурман – идем в мелководный рыбацкий район, X-band (Furuno) установлен неудобно, а на ECDIS’е только AISцели видно… Не будет сервиса… ну и ничего.
А подключено было все так… Из радара Furuno (connector ECDIS) двух жильный провод шел на коннектор ARPAA в Transas, прописанный в сервисных настройках «ARPAA, COM 7, baudrate: 4800, parity: none, bits: 8, stopbits: 1».
С Sea Hawk’а торчал другой двухжильный провод, подписанный (спасибо заботливым установщикам) «Gyro input for Sea Hawk», а в Gyro serial booster (Ratheon-Anschuetz, STD 220), в котором 36 пинов, ничего вставлено не было.
И начал штрурман писать во все четыре службы поддержки (Sea Hawk, Furuno, Transas, Ratheon-Anschuetz) – благо на судне есть возможность е-майлы без ограничений писать… Сфотографировал все, связанные с подключением входящих/исходящих сигналов порты и джамперами отправил им – мол, спасайте, кто может, в море мы – вас не позовем, так что уж сами как нибудь…
Три дня и три ночи велась переписка с Transas, три дня и три ночи страшный помощник со старшим навигатором ковырялись в проводах под консолью мостика, искали какой куда всунуть…. Протестировали выходящий из радара провод – питание есть, но не переменное, а постоянное. Нашли провода соединений от X-band и S-band с ECDIS и обнаружили, что туда идут сигналы разной полярности… Подключили все одинаково по инструкции Transas Support…сигнала нет.
Начали играться с протоколом передачи данных (менять baudrate, bits, stopbits и т.д.) – сигнала нет.
Transas в итоге ответили что все подключено правильно, а сигнал почему не идет, не знают, пишите, мол, в Furuno.
Ну а Furuno с SeaHawk’ом хранят торжественное молчание… мол, сервис заказывайте, а то заняты мы очень…
1) Подключение гиро к радару по серийному NMEA соединению:
Нужно отдать должное немцам из Ratheon-Anschuetz – те, как и Transas, ответили сразу, даже инструкцию по подключению Gyro Serial Booster прислали.
И вот одним сказочным утром страшный помощник ковыряючись в этой инструкции, нашел куда подключить исходящий сигнал от гиро. Главное в этом деле было найти две вещи: из каких пинов выходит + и – Tx NMEA сигнала с распред коробки (serial booster) компаса и где эти + и – на радаре SeaHawk (в настройках радара было видно, что компас ранее был подключен по серийному NMEA соединению). Выключили радар, компас работал себе и работал… Подключили провода и вуаля! Картинка ожила. Танцевали страшный помощник и электромеханик джигу и радостно распивали на мостике кофе потом…
2) Подключение ARPA к ECDIS серийному NMEA соединению:
Но.. не было покоя страшному помощнику. Раз гиро подключили, значит и цели от ARPA можно попробовать подключить не от Furuno, а от SeaHawk.
В процессе перерывания installation manuals всего перечисленного выше оборудования (Furuno 2117 X-bandradar, Consillium SeaHawk radar, Transas Navi-Sailor 4000 ECDIS) в разделах Input/Output signals было найдено, что практически все данные на эти приборы передаются по серийному NMEA соединению, согласно стандарту IEC-61162-1/2 «Maritim enavigation and radiocommunication equipment and systems – Digital interfaces». При этом протокол передачи данных практически для всех сигналов, кроме AIS, один и тот же:
Соединение осуществляется с помощью двухжильного провода, главное, соблюсти полярность.
При этом передаются кодированные строчки, например в случае с ARPA – ECDIS соединением строчка называется ТТМ – TrackedTargetMessage.
По инструкции установки радара Sea-Hawk нашли коннектор для передачи TTM, подключили в коннектор на Transas и вуаля– вместо положенной строчки пошла абра-кадабра…. Думал-думал страшный помощник… читал инструкцию… и просто поменял полярность проводов на противоположную: вуаля! Цели на электронной карте! Опять танцуем джигу).
Но не давало покоя страшному помощнику то, что с Furuno сигнал, который так хорошо шел в прошломм рейсе больше на Transas не приходит. И начал думу думать:
1/ Физически соединение в порядке. Провода правильно подключены. Transas это подтвердили, да и на примере другого радара – все работает.
2/ Протокол передачи данных менять не нужно, т.к. ранее сигнал шел с тем же протоколом и все было нормально, а сейчас сигнал не приходит вообще.
Вывод: что-то не так с настройками Furuno.
И вот очередное перерывание инструкции по установке привело к следующим выводам, и как говорится «без пол литра было не разобраться». В случае страшного помощника имелось в виду пол литра кофе ))
В ход меню базовых настроек Furuno 2117 производится путем зажатия кнопки HLOFF и 5-ти кратного нажатия кнопки MENU.
Далее MENU – INITIALIZE – ARP PRESET. В графе TTM OUTPUT: OFF / REL / TRUE выбираем TRUE.
То есть включаем передачу строчки ТТМ на ЕСDIS.
Но, как оказывается, и этого не достаточно…
Опять MENU – INITIALIZE – OTHERS. B графе INS: OFF / SERIAL / LAN выбираем OFF!!!.
И вот цели с Furuno 2117 X-band появляются на Transas Navi-Sailor 4000 ECDIS!!!
Сразу прошу извинить, если что напутал в терминах, но как мог... образование все-таки не то )
Вот и сказочке конец, а кто понял – молодец!
Кто не понял, не стесняйтесь – спрашивайте, постараюсь разъяснить.
Как я и говорил ранее, на очереди новый видеокуркурс по радару Furuno. На этот раз курс от меня, Евгения Богаченко. Я постарался учесть Ваши пожелания и сделал курс по конкретной модели радара Furuno. При этом также есть пара уроков, касающиеся общей теории.
Я также знаю, что в общении мы говорим слово «радар», а на самом деле правильнее говорить РЛС и САРП. Но так уж повелось, что, работая на иностранных судовладельцев, мы просто не сталкиваемся с русскими аббревиатурами. Поэтому в курсе Вы чаще встретите «Radar/ARPA».
Сам видеокурс "Radar/ARPA FURUNO" состоит из 17тиуроков общей продолжительностью более двух часов. Курс действительно будет полезен, как и начинающим штурманам, так и опытным судоводителям, которые хотят глубже изучить возможности радара Furuno. Курс "Radar/ARPA FURUNO" можно приобрести здесь.
Очень часто на судне можно найти много мелких (а иногда и крупных) упущений. Что-то делается не так, что-то не делается, на что-то закрывались глаза. И чем больше опыта приобретаешь, тем больше замечаешь. Главное относится к этому спокойно. Всего не переделаешь. Но то, что можно сделать для своего удобства, нужно делать.
Также, думаю, что многие сталкивались с тем, что на радаре (АРПА), эхо-сигнал судна не совпадает с его АИС сигналом. Как показано на картинке вверху поста. И сразу напрашиваются выводы, что АИСу доверять нельзя, а вот радар врать не может. И за истину принимают эхо-сигнал. Конечно, эти сигналы расходятся на хорошей дистанции от нашего судна, и по мере приближения к нашему судну они «сливаются воедино».
Я решил всё-таки пролистнуть мануалы и вот что выяснилось. Позиция АИСовской цели наносится по координатам. Т.е. по широте и долготе цели относительно позиции нашего судна. Ну, а то, что эхо-сигнал наносится по пеленгу и дистанции, мы уже знаем. Отсюда и разница между пеленгами (EBL) на АИСовскую цель и на эхо-сигнал.
В нашем случае она достигает 5 градусов.
Так что можно сделать? Можно подвинуть эхо-сигнал. На самом деле мы будем вносить поправку для положения антенны. Нам нужно, чтоб отсчет курсового угла на цель был относительно курса судна. Другими словами, чтоб цели, которые мы видим прямо по курсу, отображались на радаре на линии курса нашего судна (heading). Подобная поправка вводится при установке антенны, так как очень сложно выставить положение антенны идеально правильно. Поэтому подробности этой процедуры описаны в Installation Manual (к информации есть ещё и Operator’s Manual). Но случается и так, что в ходе эксплуатации радара нужно эту поправку подстраивать (либо после некоторых юзеров хотя бы просто возвращать так, как было).
Итак, нам нужно войти в меню «INITIALIZE». И тут не всё гладко. Мы рассматриваем радар Furuno. И у него может быть два вида панели управления. Если «большая», то нужно нажать «MENU». Потом удерживая «HL OFF» (обычно клавиша «1») нажать клавишу «MENU» пять раз. Да именно, одну кнопку держим, а другую пять раз нажимаем.
Если же «маленькая» панель управления, то нужно подвести курсор на функцию «MENU» на экране радара (не нажимать, просто расположить курсор поверх «MENU»). На панельке нажать и удерживать «F1» и нажать правую кнопку панели пять раз. На пятый раз Вы должны услышать тройной сигнал.
В появившемся окне выбираем «ECHO ADJ»
Ну и дальше целимся в «HD ALIGN». Сейчас там отсчет 010,5 градусов.
Нажав на «HDG ALIGN» мы колесиком на панели можем изменить его значение. Если включена функция «TRAIL» (что обычно), то можно наблюдать, где цель была (синий след) и куда переместилась (желтое пятно).
Рекомендуется взять пеленг на ориентир визуально и при помощи радара. Разницу ввести как поправку. Но по сути, можно покрутить колесо на панели, посмотреть, куда перемещается цель (по часовой стрелке или против часовой стрелки) и совместить эхо-сигнал с сигналом АИСа. Сам так и сделал. Конечно же, понаблюдал, насколько картинка на радаре соответствует действительности, и вывод – всё отлично. На личном опыте убедился, насколько неудобно, когда эта поправка не учтена, в ситуации при расхождении с маленьким рыбаком. По радару рыбак уже курс пересек, а по факту ему ещё чапать и чапать до пересечения курса судна.
Мы все привыкаем к радару (АРПА, РЛС). Пользуемся и не задумываемся, а что делать, если вдруг антенна радара перестанет вращаться? Что будет если радар остановиться? И нужно ли что-то делать, чтобы этого не произошло?
Вот Вашему вниманию представлена фотография мотора антенны радара (вверху). Там где посредине выемка (паз) – это результат того, что метал был съеден пружиной. Какой пружиной и зачем она там?
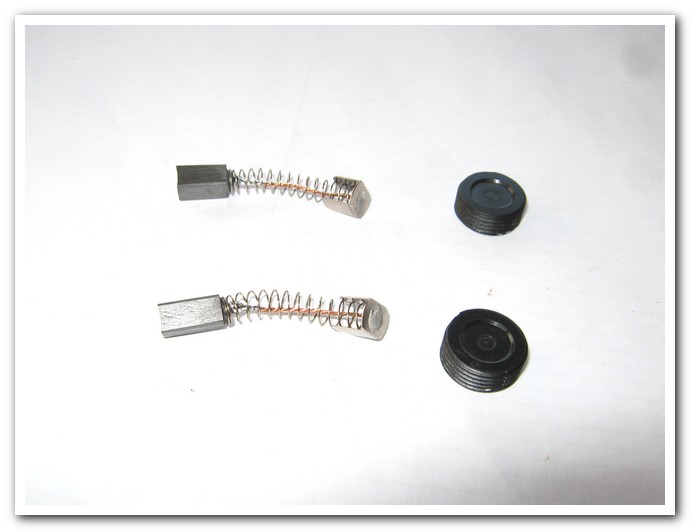
Для того чтобы антенна вращалась, на её мотор нужно подавать электричество. Подается электричество через так называемые щетки или графитовые щетки, по-английски - carbon brush. Это нехитрое устройство используется и в вертолетах, и в электродрелях и нетолько. На конце пружины грифель, который проводит электричество. Грифель мягкий и подразумевается, что он будет крошиться, а механизм будет оставаться целым. Ну и конечно по истечению определенного времени эти щетки должны меняться. Иначе будет, как на картинке вверху. И недолго до того, что антенна просто остановиться.
Чтобы там ни было, нужно что-то делать уже с имеющейся ситуацией. Ну и в данном случае, паз был выровнен.
Потом вставили новые щетки. Их кстати две. Вставляются с боков.
И напоследок закручиваются пробками.
Это не сложная процедура. И желательно иметь эти щетки в запасе. А для того, чтобы заказать правильные щетки, нужно почитать мануал к радару и найти подобную информацию. Ну и не забывайте переодически проверять их состояние в антенне.
Как Вы видите, они всего лишь пару сантиметров длинной, но играют огромную роль в нашей профессии и безопасности мореплавания в целом. Успехов!
Вопрос об определении границ зоны, опасной в отношении излучения антенн судовых радиотехнических средств является исключительно актуальным. Во многих судоходных компаниях внутренние руководящие документы требуют нанесения этих границ на палубе под мачтой (причём не только для локатора, но и для станции спутниковой связи “Inmarsat-F”).
Кроме того, периодически приходится организовывать работу судовых специалистов на значительном расстоянии от источника излучения, но в пределах покрытия его диаграммы направленности. В такой ситуации почти неизбежно возникает конфликт между теми, кто несёт навигационную вахту и теми, кто выполняет упомянутые работы. На борту всегда отсутствуют средства объективного контроля за уровнем электромагнитного излучения, поэтому в такой ситуации спор обычно решается (не всегда обоснованно) в пользу полного отключения всех передающих устройств, и, как следствие, технического «ослепления» навигационной вахты.
На сегодняшний день во всех цивилизованных странах требования к безопасной для здоровья организации рабочего места определяются национальными гигиеническими нормами. В России, например, таковыми (относительно допустимых уровней электромагнитных полей) являются «Санитарно-эпидемиологические правила и нормативы СанПиН 2.2.4.1191-03» «Электромагнитные поля в производственных условиях» (утв. Главным государственным санитарным врачом РФ 30 января 2003 г). Оба типа судовых локаторов (диапазона «S» с рабочей частотой 2900...3100 МГц и диапазона «X» с частотой 9320...9500 МГц) отнесены этим документом к одному классу источников излучения (диапазон радиочастот 300.0 МГц – 300.0 ГГц) и между ними для целей определения безопасных условий работы различий нет. Правилами оговорено два важнейших параметра, подлежащих контролю: плотность потока энергии электромагнитного поля (ППЭ = [мкВт/см2]) и энергетическая экспозиция (ЭЭ = [(мкВт/см2)*ч]). Связь между ними установлена формулой:
ЭЭ = ППЭ * Т, где Т [ч] – время нахождения под воздействием поля
Максимально допустимая величина ППЭ – 1000 мкВт/см2. При таком значении параметра запрещены любые работы в зоне излучения. Если ППЭ ниже указанной, то подвергаться воздействию такого поля можно только некоторое время, в течение которого величина энергетической экспозиции не превысит максимально допустимой (200 (мкВт/см2)*ч за смену). Пример: если специалист находится в электромагнитном поле с ППЭ = 500 мкВт/см2, то работать он может в течение: Т = ЭЭ/ППЭ = 200/500 = 0.4 (ч) = 24 (мин)
Измерить ППЭ можно с помощью специального прибора: измерителя плотности потока энергии (см. рисунок ниже)
Измеритель плотности потока энергии П3-41
На вопрос, влияет ли установленная шкала дальности на величину опасной зоны вблизи антенны, может ответить только руководство пользователя к конкретному образцу РЛС. Если изучаемая мощность изменяется с установкой большего предела измерения, тогда ответ утвердительный.
Поскольку, как отмечалось выше, на борту невозможно выполнить измерения по описанной методике, то наиболее простым решением будет принять меры предосторожности, рекомендованные производителем РЛС в руководстве по установке. Например, для локатора “JRC” модели «JMA 9832» с антенной «NKE-1079/1075» запрещено приближаться к излучающей поверхности ближе 1.1 метра.
Подводя итог, отмечу, что, в конечном счёте, приоритет при принятии решения об отключении оборудования или выполнении работ под излучением должен отдаваться безопасности судна и благополучию людей, находящихся на нём. Если у штурмана возникают малейшие сомнения по этому поводу, следует воздержаться от выполнения любых действий в зоне, попадающей под покрытие антеннами радиотехнических средств. Всегда существует возможность спланировать такие операции заранее и выполнить их в более спокойной обстановке с полным отключением всех источников излучения.
Давайте сперва уясним, что в судовых РЛС импульс с антенны не распространяется во все стороны одновременно. Антенна формирует радиолокационный луч, который в зависимости от антенны в горизонтальной плоскости 0,7°-2,5°, а в вертикальной – около 20°.
На деле происходит так – антенна вращается и испускает импульсы в определенном направлении (можно даже сказать, что в определенной полосе, луче). Когда во время вращения антенны в область луча попадает объект, от него отражаются импульсы. В зависимости от самой антенны и выбранной шкалы дальности частота следования импульсов варьируется от 500 до 4000 в секунду. Таким образом, за то время, пока луч проходит через объект от него отражается n-ое количество импульсов. Это количество зависит от размеров самого объекта и его способности отражать импульсы. Считается, что для хорошего отражения цели на экране радара, нужно чтобы отразилось 5-10 импульсов.
Так причем здесь Диаграмма направленности? Дело в том, что характеристики луча, который исходит от антенны принято показывать в виде диаграммы, и назвали её – Диаграмма направленности.
На рисунке диаграмма направленности и нас интересует Главный лепесток. Боковые лепестки образуются в результате рассеивания электромагнитной энергии и являются источниками ложных сигналов. Тут же идет привязка различных зависимостей. Например, разрешающая точность по направлению и точность направления зависит от ширины диаграммы направленности. Ещё, чем острее диаграмма направленности, тем правильнее по размерам объекты передаются на экран (т.е. цели не растягиваются).
Нельзя обойти стороной и тот факт, что на судах используются РЛС двух типов X-band (3см) и S-band (10см). 3 и 10 см – это длина волны, и выбраны они таковыми тоже не случайно. Но сейчас мы обратим внимание на то, что у X-band ширина диаграммы направленности в горизонтальной плоскости от 0,6° до 1,8°, когда у S-band от 1,8° до 2,3°. Эти характеристики, даже если и не являются ключевыми, но и не маловажны. Зная это, становится понятно, почему рекомендуют держать 3см радар на меньших шкалах, а 10см – на больших. Ведь на больших шкалах две рядом находящиеся цели могут отражаться как одна. На малых шкалах, да и ещё с узкой диаграммой направленности, вероятность того, что эти две цели распознаются отдельно – гораздо больше
Но при этом не следует забывать, что при дожде, тумане и других метеообразованиях лучше использовать 10см радар, даже на малых шкалах. Так как на экране 3см радара будет сплошная засветка и шумоподавление в таких случаях – бесполезно.
По поводу функций IR и ES. IR (Interference Rejector) - уменьшает помехи, связанные с интерференцией. Т.е. помехи, которые возникают, когда два рядом находящиеся радара работают на одной частоте. Эта функция также уменьшает помехи от волн, но нужно учитывать, что и слабые цели тоже будут заглушаться. ES (Echo Stretch) – наоборот, усиливает отображение целей. Т.е. мелкие цели на экране радара будут отражаться крупнее. Но при этом и помехи тоже будут усиливаться. Так что идеального (универсального) режима настройки радара – нет. Нужно каждый раз ориентироваться под окружающую Вас обстановку.
Продолжаем говорить о радарах. И перед тем, как мы рассмотрим главные вопросы, нужно четко представлять то, как работает радар. Т.е. как излучается импульс и как принимается сигнал.
Судовые радары (РЛС) основаны на импульсном методе. Если говорить проще, то есть передатчик и приёмник. В антенне находится переключатель, который в момент подачи импульса подключает антенну к передатчику и защищает приёмник от воздействия этого мощного импульса. После подачи импульса, передатчик соединяет антенну с приёмником до генерации следующего импульса.
Отсюда следует, что один цикл состоит из периода, когда импульс вырабатывается, и период, когда антенна работает на прослушивание и ждет отраженный сигнал. Длительность цикла определяется максимальной дальностью, на которую рассчитана развертка индикатора. Т.е. если менять шкалу дальности на радаре (3, 6, 12, 24 мили), то будет меняться и длина всего цикла импульса. На больших шкалах — длинные импульсы, и чем меньше шкала — тем короче импульс (цикл).
Так как в основу обнаружения цели положено свойство постоянство скоростей распространения радиоволн, то после подачи импульса, он должен быть принят, и по нему будет рассчитана дистанция до цели. Следующий импульс будет сгенерирован только, когда дойдет сигнал от самого дальнего объекта, при заданной развертке индикатора. Другими словами, дистанция до цели измеряется по промежутку времени между подачей радиоволны и принятием эхо-сигнала. И важно быть уверенным, что именно данному импульсу соответствует принятый эхо-сигнал.
Теперь мы можем поговорить о том, что саму длительность импульса можно менять в настройках радара. Делается это обычно в левой верхней части экрана: Long Pulse (LP), Medium Pulse (MP), Short Pulse (SP). Но нужно понимать, что это нам даёт.
При увеличении длительности импульса увеличивается дальность действия станции. Т.е. посылается более мощный поток энергии, и радар сможет лучше обнаруживать цели на дальних дистанциях. Но при этом нужно помнить, что минимальная дальность обнаружения целей увеличится (что нам не выгодно в некоторых случаях). Дело в том, что отраженный сигнал от ближних целей не может быть различен на фоне мощного увеличенного зондирующего импульса.
При уменьшении длительности импульса мы получаем следующие выгоды: — лучшее обнаружение целей, расположенных близко к судну; — улучшается разрешающая способность по дальности (радар может определить отдельно два рядом находящихся объекта с одними угловыми координатами); — увеличивается частота следования импульсов, что в свою очередь повышает вероятность обнаружения цели. Ведь, для надежного обнаружения целей необходимо, чтобы за каждый цикл радиолокационного обзора от объекта отражалось, по крайней мере, 5 импульсов.
На обзор целей также влияет и скорость вращения антенны. Чем выше скорость, тем чаще диаграмма излучения оказывается направленной на объект. И раз уж мы об этом заговорили, то одной из характеристик антенны является диаграмма направленности. Но эту темя мы уже затронем в следующий раз.
Недавно заглянул на одном форуме в тему, касающуюся радаров (АРПА). Обычно в таких местах обсуждаются вопросы от использования векторов до настроек картинки радара. И конечно есть несколько категорий, на которые разбиваются форумчане. Первая — это операторы, а вторая — радиотехники. И те, и другие — судоводители, только вторые имеют в прошлом радиотехническое образование. Кто встречался с такими по работе, наверняка заметил их щепетильное отношение к радару.
Ну и, конечно, есть ещё одна категория форумчан, которые всех учат и говорят, что так неправильно и вот только они знают как правильно. Обычно от них ничего конкретного не добьешься, хотя я и не отрицаю, что они действительно могут знать.
По поводу того, в каком режиме лучше держать радар и как часто его настраивать. Здесь, я считаю, вообще каждый хозяин на мостике во время своей вахты и в интересах каждого уметь настраивать радар. По поводу векторов и ориентации. Однозначно, на своей вахте нужно держать радар так, как удобно тебе (пока, конечно, капитан не потребует изменить). Но хороший капитан сделает поправку на то, что главное, чтобы обеспечивалась безопасность. А она обеспечивается, среди прочего и тем, когда человек понимает, что он видит на радаре и ему удобно. Постоянные споры с коллегами о том, в каком режиме нужно держать радар — полная глупость. Приняли вахту и делайте, как удобно Вам, другой сделает так, как удобно ему. Лично у меня споров с коллегами никогда не было. Я одинаково хорошо работаю с любыми векторами, главное обратить внимание и знать, что у тебя сейчас на экране. Другое дело, что в прибрежных районах я предпочитаю истинные вектора при относительном движении.
Как часто подстраивать радар, раз в день или раз за вахту? Отличный вопрос. Но подстраивать его нужно так часто, как это необходимо. То что раз за вахту — это точно. Пришли и настроили, если не под себя, то для себя. Вы теперь несёте ответственность. Вы должны сделать так, чтобы была наилучшая картинка. И это не та картинка, где нет помех. Это такая картинка, где вы видите цели и при этом засветка от помех должна быть как можно меньше, но главное, чтобы отображались цели. Нужно найти среднее, оптимальное решение. Здесь ещё можно кучу всего добавить, но это основное. А так, можно подстраивать радар хоть каждые 15 минут, если того требуют обстоятельства. Например, изменяется погода.
Ещё нужно «чувствовать» радар. Я не люблю, когда экран идеально черный. Для этого, когда настраиваешь радар, регулятор «Gain» крутишь на увеличение до тех пор, пока не станет появляться шум фона (помехи) на экране. Тут нужно остановиться и даже можно слегка подкрутит на уменьшение. Т.е. шум на фоне должен быть слегка видимым. Так Вы скорее увидите слабые цели и у Вас будет хороший контраст между целями и фоном.
Но это не всё, что нужно учитывать. У Вас есть ещё ряд регуляторов: Sea, Rain и Tune. Sea и Rain — это шумоподавление от моря и дождя соответственно. Здесь ничего сложного нет, но нужно быть осторожным. Некоторые забывают оптимально настраивать шумоподавление из-за чего не видят некоторые цели. Плюс некоторые сомневаются, может ли быть шумоподавление на нуле? Вполне, если штиль и погода хорошая, то и Rain и Sea могут быть на нуле.
С Tune ещё проще, нужно крутить регулятор до тех пор, пока не добьёшься максимального значения индикатора на экране.
И вот когда Вы знаете всё вышеперечисленное, то сможет стать интересно, а что же это за режимы настройки Harbour, Shore и Picture 1, 2, 3? А также какая разница между Long Pulse и Short Pulse? Если Вам будет интересно, то мы поговорим об этом в следующих постах.
 Key4mate | Евгений Богаченко
Key4mate | Евгений Богаченко