-
 Key4mate | Евгений Богаченко
Key4mate | Евгений Богаченко
- 14 14 837

В прошлом посте мы обсудили требования ИМО к точности радионавигационных систем и связанные с этим изменения в практике современного судовождения.
В этот раз, как я и обещал, мы приблизимся к СКП (среднеквадратической погрешности).
Не углубляясь в теорию вероятности и методы обработки измерений, определим СКП.
СКП – среднестатистическое отклонение случайной величины от наиболее вероятного значения. Эта характеристика используется при оценке любых измерений, подверженных случайным погрешностям, в том числе и в навигации, как промежуточная величина для оценки точности места судна.
Согласно требованиям ИМО позиция судна должна быть определена «с погрешностью не более Х м с вероятностью 95%». Х – погрешность, зависящая от конкретных условий плавания.
Однако, при этом фигура погрешности не определяется (а как нас учат, теоретически верным для этого является эллипс). С другой стороны, наличие погрешности не более Х м с вероятностью 95% означает, что судно должно находиться вблизи определенной позиции в пределах круга радиусом Х м.
И в этом месте, я, честно говоря, стал на распутье. Меня попросили разъяснить что же такое СКП, но на практике, исходя из требований ИМО, сама СКП нам и не нужна… Стоит ли вдаваться в теоретические дебри?
Но давайте по порядку. Из прошлой статьи мы сделали вывод, что определять посредством штурмана (т.е. что-то измеряя, нанося это на карту и получая в итоге позицию) все-таки нужно.
Как мы это делаем?
Чаще всего берем пеленг-дистанцию, два пеленга или две дистанции ориентира по радару, отмеряем эти параметры на карте (бумажной или электронной) и на пересечении линий положения получаем точку – обсервованную позицию.
Самыми сложными, особенно для начинающих штурманов, оказываются волшебные манипуляции с циркулем, измерителем и параллельной линейкой, плюс за это время нужно не забыть параметры снятые с радара, не перепутать навигационный ориентир (бывает, что два мыса на радаре, как две сестры похожи) и не отмерить, совершенно случайно, дистанцию по шкале долготы… Ну вот волшебство свершилось, все счастливы – задача решена!
И тут к нам подкрадывается STCW настойчивым требованием оценить точность позиции…
Что происходит на самом деле?
Любые измерения подвержены погрешностям… Судно испытывает бортовую качку и рыскает, развертка радара имеет определенное разрешение и форма объектов в зависимости от их отражающей способности искажается и т.д.
В техническом описании радара или гирокомпаса всегда можно найти их погрешности. Например, для радара: «погрешность по пеленгу до 1°, погрешность по дистанции до 1%». Это погрешности самих приборов, на них накладываются также погрешности, вызванные условиями измерений (качка, видимость, искажение контура берега на радаре).
И вместо позиции на карте наше судно на самом деле оказывается в какой-то другой позиции.

Когда у нас есть GPS, мы непрерывно видим позицию судна на экране ECDIS и нас это абсолютно не смущает. Т.е. появляется, так называемое, «передоверие» технике: «Ну, я не там по пеленгам, и что? – ECDIS все верно отображает, значит я где-то ошибся». Затем ставится точка на курсе, а не мимо курса, где она на самом деле, затем судно садится на мель… потому что GPS сигнал по какой-то причине не поступил на ECDIS (от вибрации кабель отошел), ECDIS перешел в режим DEAD RECKONING (счисление), а аларм, «по запаре», подтвердили не прочитав.
Это может и звучит как сценарий из фильма «Пункт назначения», но, как показывает практика, если халатность входит в норму, в конце концов, это заканчивается аварией.
И тут возникают вопросы: а как же оценить точность нашей позиции и как правильно выбирать ориентиры для определения позиции судна?
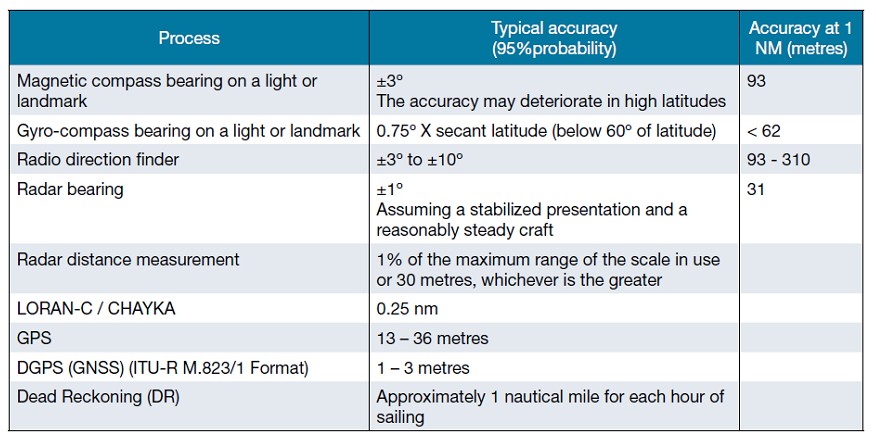
Начать следует с погрешностей измерительных приборов. Как указано выше, эту информацию можно почерпнуть из их технической документации. Согласно рекомендациям IALA (International Association of Lighthouse Authorities) в среднем навигационные измерения несут в себе следующие погрешности:
Однако, даже не зная этих погрешностей, мы можем примерно оценить точность обсервации:
по двум пеленгам: R95% = 0.06 Dcp (осреденное расстояние до оиентиров);
по двум расстояниям: R95% = 0.03 Dшк (размер шкалы – 3, 6, 12 миль и т.д.)
по пеленгу и расстоянию: R95% = 0.04 Dшк.
Теоретически правильно оценивать погрешность определения судна эллипсом. Эллипс обусловлен тем, что линии положения (например, пеленга и дистанции) имеют разные погрешности и погрешность места судна менее рассеяна относительно более точной линии положения и более рассеяна относительно менее точной. Полуоси эллипса рассчитываются на основе СКП измерений навигационных параметров (таблица выше). От эллипса переходят к радиальной погрешности М, которую также называют СКП места судна. Ее вероятность составляет 63.2-68.3%, если эту величину увеличить вдвое, исходя из формы гауссовского распределения, принятого в качестве стандарта для оценки погрешностей, получим предельную погрешность с вероятностью 95.4-98.2%.
Упрощая последнее, считают, что погрешность места судна с 95%-й вероятностью равна удвоенной радиальной СКП.
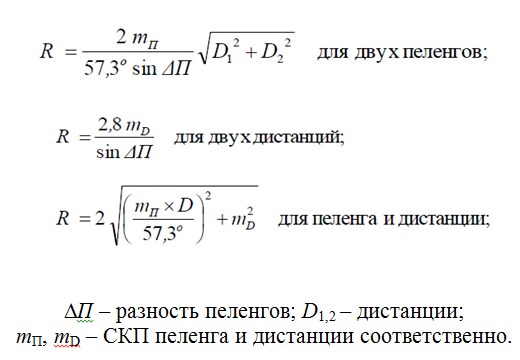
Определить погрешность обсервации с вероятностью 95% можно по формулам:
Рассчитать наиболее вероятную позицию и ее 95%-ю погрешность по трем линиям положения вручную гораздо сложнее. Поэтому здесь лишь приведу результаты такого расчета (рисунок и таблица ниже), которые, кроме того, помогут наглядно показать, какие комбинации линий положения для определения места судна лучше и почему.
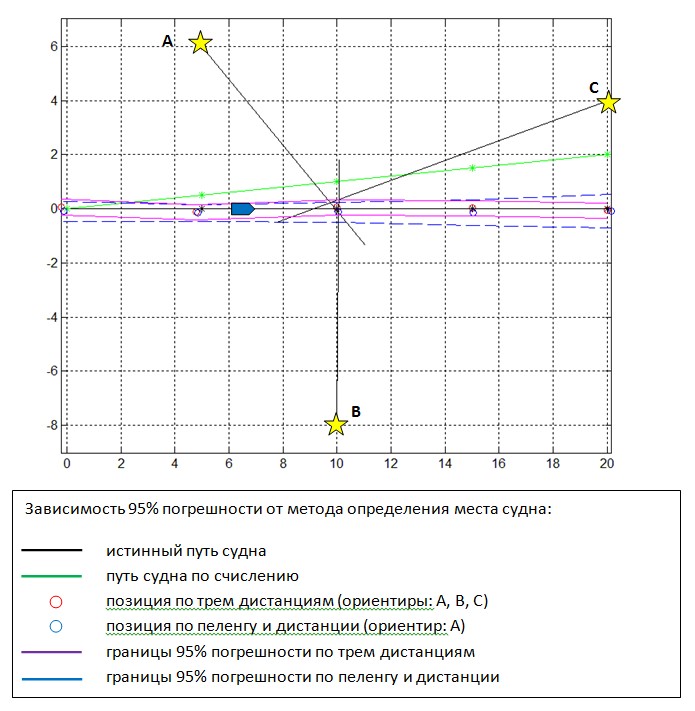
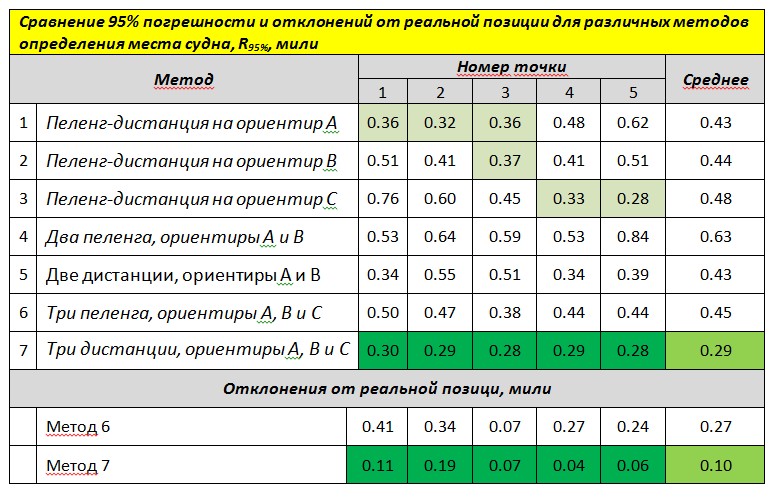
Как видно из рисунка и таблицы, наиболее точным является определение по трем дистанциям.
Второе место отводится методу определения по пеленгу-дистанции, причем в зависимости от близости навигационного ориентира. Как видно из таблицы: первые три точки будут получены точнее по ориентиру А, затем на 4-5 точки – по ориентиру С.
Погрешность линий положения пеленга сильно зависит от дистанции до ориентира (что и видно из таблицы), в тоже время погрешность линий положения дистанции зависит только от выбранной шкалы.
Важным фактором является взаимное расположение ориентиров. Так при определении по дистанциям, если ориентиры расположены друг напротив друга, погрешность становится на порядок выше и в некоторых случаях линии положения могут не пересечься вообще. То же самое происходит и с линиями положения пеленгов на ориентиры, находящиеся слишком близко друг к другу.
При определении по трем ориентирам, наиболее вероятная позиция судна не всегда находится в середине треугольника погрешностей. Она находится ближе к более точным линиям положения (как правило, образованных ближайшими ориентирами).

Напоследок, проанализируем формулы для R95%, приведенные выше. В качестве СКП навигационных параметров примем mП = 1°, mD = 0.12 мили (для шкалы 12 миль). Для упрощения задачи в формуле для двух пеленгов примем D1=D2.
Зависимость 95% погрешности места судна от угла между линиями положения при определении по двум дистанциям
Из рисунка выше видно, что на острых углах < 40° (ориентиры рядом) и тупых углах > 140° (ориентиры друг напротив друга) погрешность определения места судна по двум дистанциям значительно вырастает.
Зависимость 95% погрешности места судна от угла между линиями и дистанции для метода «пеленг-дистанция» (штриховая линия) и «два пеленга» (сплошные линии)
При определении по пеленгу-дистанции линии положения перпендикулярны друг другу, и погрешность в этом случае зависит только от дистанции до ориентира.
При определении по двум пеленгам погрешность зависит и от дистанции, и от угла между линиями положения. При этом наименьшая погрешность возникает в случае, когда линии положения пересекаются под прямым углом (sin 90° = 1). При уменьшении и при увеличении угла между линиями положения от 90° погрешность увеличивается, что явно видно из приведенного графика.
Ну, вот и вся информация, подготовленная для этого поста.
Надеюсь, она оказалась Вам полезной. Здесь я постарался опустить многие теоретические моменты, чтобы не перегружать материал статьи.
Буду рад Вашим комментариям, любым: позитивным, негативным и особенно критическим. Так Вы поможете сделать подачу соответствующей дисциплины лучше.
С наилучшими пожеланиями, Александр Пипченко
- Теги:
Комментарии
Евгений Богаченко
30 марта 2013
Максим Скрипник
31 марта 2013
maersk
31 марта 2013
Капитан Леонид Пивоваров
31 марта 2013
Марк
01 апреля 2013
Александр Пипченко
01 апреля 2013
Евгений Богаченко
02 апреля 2013
Марк
02 апреля 2013
Марк
03 апреля 2013
Евгений Богаченко
06 апреля 2013
Костя
05 апреля 2013
Костя
05 апреля 2013
Виталий
05 февраля 2017
Евгений Богаченко
06 февраля 2017